
Bu Minik Robot: Hem Arı Hem Vinç Sineği—Ve Nihayet Sağlam Bacaklara Kavuştu
Hayal edin ki küçük robotik arılar, vahşi çiçek tarlalarında gerçek arılara polen taşıma görevlerinde yardımcı oluyorlar. Onlarca yıl ilerisinin bu hayali, Harvard’ın Mikro Robotik Laboratuvarı tarafından yıllardır üzerinde çalışılan bir hedef. Tek engel? Yakın zamana kadar Harvard’ın RoboBee’si yalnızca çakılmayı başarmıştı.
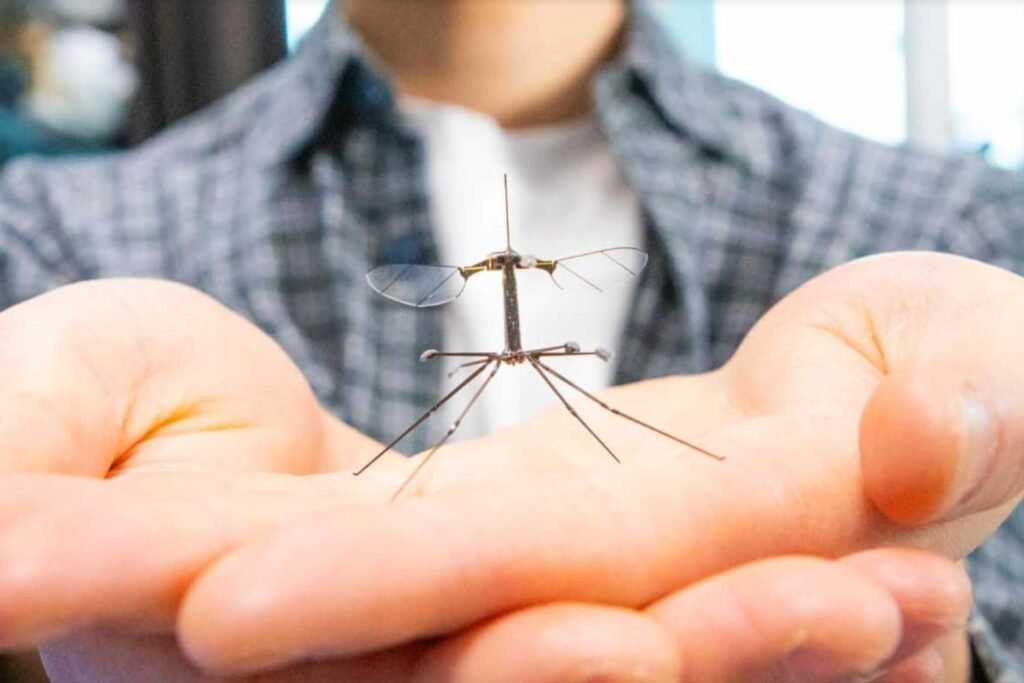
Harvard araştırmacıları şimdi RoboBee’yi, vinç sineği bacaklarından ilham alan dört uzun iniş aygıtı ile donattılar. (Vinç sinekleri, uçan örümcekler gibi görünen ve genellikle devasa sivrisinekler olarak yanlış tanımlanan ancak zararsız böceklerdir). Çarşamba günü Science Robotics dergisinde yayımlanan bir çalışmaya göre, yumuşak bir iniş, RoboBee’leri çevresel izleme, afet gözetimi, yapay polinasyon ya da hassas organizmaların manipülasyonu gibi gelecekte bilim kurgudan fırlamış gibi görünen pratik uygulamalara bir adım daha yaklaştırıyor.
“Önceden, iniş yapacağımız zaman aracımızı yerden biraz yükseklikte kapatır ve dik durup güvenli bir şekilde inmesini umarak bırakırdık,” Harvard Üniversitesi Mühendislik ve Uygulamalı Bilimler Okulu’nda doktora öğrencisi ve çalışmanın ortak yazarı Christian Chan, Harvard’ın açıklamasında belirtti.

Robert Wood liderliğindeki Harvard mühendislik ve uygulamalı bilimler profesörü, Chan ve meslektaşları, üniversitenin Karşılaştırmalı Zooloji Müzesi veritabanında yeni bir iniş tasarımı için ilham aradılar. Sonunda vinç sineğinin morfolojisini seçerek RoboBee’yi daha yumuşak bir iniş için dört uzun, eklemli bacak ile donattılar. Güncelleme ayrıca minik robotun iniş yaklaşımını yavaşlatmak için geliştirilmiş bir kontrol cihazını (robotun beyni) de içeriyordu. Sonuç ise, açıklamada belirtildiği gibi “nazik bir çatırtı” şeklini aldı.
RoboBee’nin önceki sürümleri, uçuş yapan helikopterlerin de karşılaştığı ancak RoboBee için daha karmaşık olan “yer etkisi” adı verilen bir sorun nedeniyle kontrollü iniş yapmada zorluk yaşıyordu. 0.004 ons (1/10 gram) ağırlığında ve sadece 1.2 inç (3 santimetre) kanat açıklığına sahip olan RoboBee için bu problem daha bilhassa zorlu hale geliyor.
“Herhangi bir uçan aracın başarılı bir inişi, yüzeye çarpmadan önce hızın en aza indirilmesine ve çarpışmadan sonra enerjinin hızla dağıtılmasına dayanır,” açıklamasında belirtildiği gibi Nak-seung Patrick Hyun, eski Harvard doktora sonrası araştırmacısı ve şimdi Purdue Üniversitesi Elektrik ve Bilgisayar Mühendisliği Okulu’nda yardımcı profesör. Hyun, RoboBee’nin hem katı yüzeylerde hem de bir yaprakta karınca gibi iniş yeteneklerini test etti.

Vinç sineği bacakları ve güncellenmiş kontrol cihazı, aynı zamanda RoboBee’nin hassas piezoelektrik aktüatörlerini—minik robotun böcek kaslarına eşdeğer—de koruyor. Araştırmacılar, “Mikro robotlar için piezoelektrik aktüatörlerin temel dezavantajları, kırılganlıkları ve düşük çatlama tokluğudur,” dedi. “Uyumlu bacaklar, çarpışma kaynaklı kırıklar sırasında hassas piezoelektrik aktüatörleri korumada yardımcı olur.”
Geleceğe yönelik olarak, ekip, RoboBee’ye algılama, güç ve kontrol özerkliği kazandırmayı amaçlıyor—açıklamada “üçlü kutsal kâse” olarak adlandırılan bu özellikler, onun şimdiye kadar uzak görünen pratik uygulamalarını gerçeğe biraz daha yaklaştıracak.


